- 您现在的位置:买卖IC网 > Sheet目录505 > RXM-GPS-SG-T (Linx Technologies Inc)GPS MODULE SMD SIRF
�� �
�
�PROTOCOLS�
�LINX� GPS� modules� use� the� SiRFstar� III� chipset.� This� chipset� allows� two�
�protocols� to� be� used,� NMEA-01� 83� and� SiRF� Binary.� Switching� between� the� two�
�is� handled� using� a� single� serial� command.� The� NMEA� protocol� uses� ASCII�
�characters� for� the� input� and� output� messages� and� provides� the� most� common�
�features� of� GPS� development� in� a� small� command� set.� The� SiRF� Binary� protocol�
�uses� BYTE� data� types� and� allows� more� detailed� control� over� the� GPS� receiver�
�and� its� functionality� using� a� much� larger� command� set.� Although� both� protocols�
�NMEA� OUTPUT� MESSAGES�
�The� following� sections� outline� the� data� structures� of� the� various� NMEA� protocols�
�that� are� supported� by� the� module.� By� default,� the� NMEA� commands� are� output�
�at� 9,600bps,� 8� data� bits,� no� parity,� and� 1� stop� bit.�
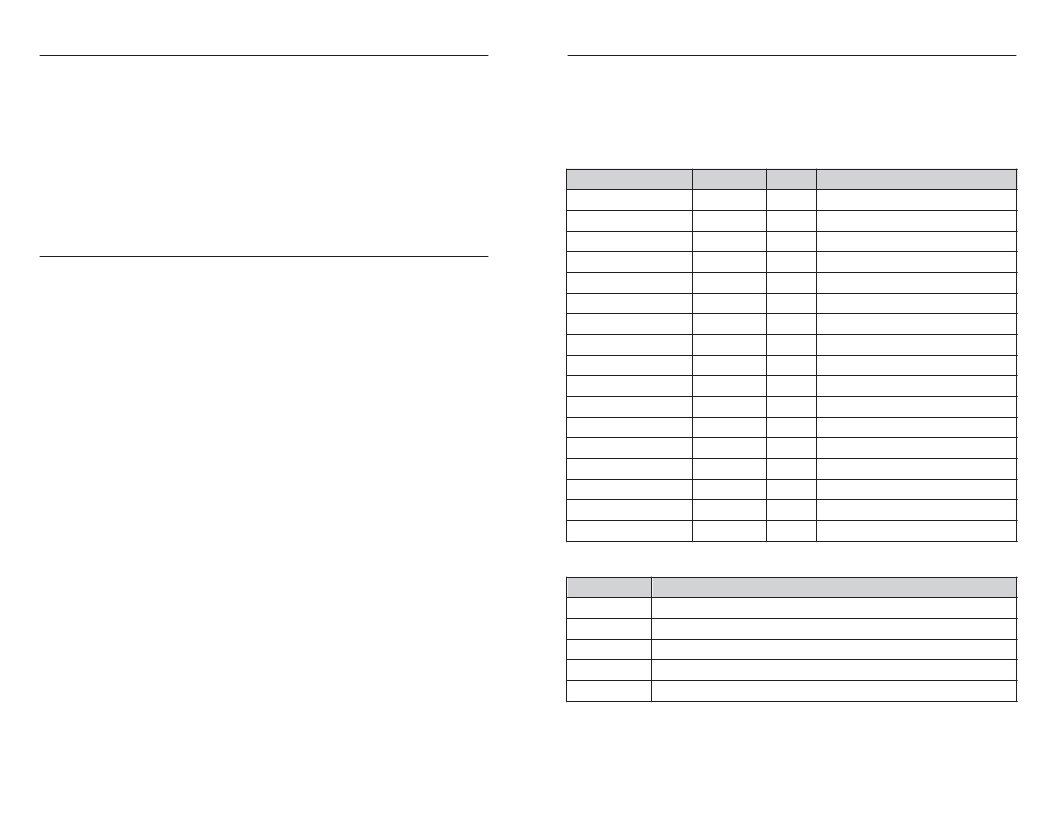
�GGA� –� Global� Positioning� System� Fixed� Data�
�The� table� below� contains� the� values� for� the� following� example:�
�$GPGGA,05� 3� 740.000,250� 3� .6� 3� 19,N,121� 3� 6.0099,E,1,0� 8� ,1.1,6� 3� .� 8� ,M,15.2,M,,0000*64�
�have� selectable� baud� rates,� it’s� recommended� that� SiRF� Binary� use� baud� rates�
�of� 38� ,400bps� or� higher.� For� a� detailed� description� of� the� SiRF� Binary� protocol,�
�see� the� SiRF� Binary� Protocol� Reference� Manual,� available� from� SiRF�
�Technology,� Inc.� Although� SiRF� Binary� protocol� may� be� used� with� the� module,�
�Linx� only� offers� tech� support� for� the� NMEA� protocol.�
�INTERFACING� WITH� NMEA� MESSAGES�
�Linx� modules� default� to� the� NMEA� protocol.� Output� messages� are� sent� from� the�
�receiver� on� the� TXA� pin� and� input� messages� are� sent� to� the� receiver� on� the� RXA�
�pin.� By� default,� output� messages� are� sent� once� every� second.� Details� of� each�
�message� are� described� in� the� following� sections.�
�The� NMEA� message� format� is� as� follows:� <Message-ID� +� Data� Payload� +�
�Checksum� +� End� Sequence>.� The� serial� data� structure� defaults� to� 9,600bps,� 8�
�data� bits,� 1� stop� bit,� and� no� parity� bits.� Each� message� starts� with� a� $� character�
�and� ends� with� a� <CR>� <LF>.� All� fields� within� each� message� are� separated� by� a�
�comma.� The� checksum� follows� the� *� character� and� is� the� last� two� characters,� not�
�including� the� <CR>� <LF>.� It� consists� of� two� hex� digits� representing� the� exclusive�
�OR� (XOR)� of� all� characters� between,� but� not� including,� the� $� and� *� characters.�
�When� reading� NMEA� output� messages,� if� a� field� has� no� value� assigned� to� it,� the�
�comma� will� still� be� placed� following� the� previous� comma.� For� example,�
�Name�
�Message� ID�
�UTC� Time�
�Latitude�
�N/S� indicator�
�Longitude�
�E/W� Indicator�
�Position� Fix� Indicator�
�Satellites� Used�
�HDOP�
�MSL� Altitude�
�Units�
�Geoid� Separation�
�Units�
�Example�
�$GPGGA�
�05� 3� 740�
�250� 3� .6� 3� 19�
�N�
�121� 3� 6.0099�
�E�
�1�
�0� 8�
�1.1�
�6� 3� .� 8�
�M�
�15.2�
�M�
�Units�
�meters�
�meters�
�meters�
�meters�
�Description�
�GGA� protocol� header�
�hhmmss.sss�
�ddmm.mmmm�
�N=north� or� S=south�
�dddmm.mmmm�
�E=east� or� W=west�
�See� Table� 4�
�Range� 0� to� 12�
�Horizontal� Dilution� of� Precision�
�{,04,,,,,2.0,}� shows� four� empty� fields� between� values� 04� and� 2.0.� When� writing�
�NMEA� input� messages,� all� fields� are� required,� none� are� optional.� An� empty� field�
�will� invalidate� the� message� and� it� will� be� ignored.�
�Reading� NMEA� output� messages:�
�?� Initialize� a� serial� interface� to� match� the� serial� data� structure� of� the� GPS� receiver.�
�Age� of� Diff.� Corr.�
�Diff.� Ref.� Station�
�Checksum�
�<CR>� <LF>�
�ID� 0000�
�*64�
�second� Null� fields� when� DGPS� is� not� used�
�End� of� message� termination�
�?� Read� the� NMEA� data� from� the� TXA� pin� into� a� receive� buffer.�
�?� Separate� it� into� six� buffers,� one� for� each� message� type.� Use� the� characters� ($)�
�Table� 3� :� Global� Positioning� System� Fixed� Data� Example�
�and� <CR>� <LF>� as� end� points� for� each� message.�
�?� For� each� message,� calculate� the� checksum� as� mentioned� above� to� compare�
�with� the� checksum� received.�
�?� Parse� the� data� from� each� message� using� commas� as� field� separators.�
�?� Update� the� application� with� the� parsed� field� values.�
�?� Clear� the� receive� buffer� and� be� ready� for� the� next� set� of� NMEA� messages.�
�Writing� NMEA� input� messages:�
�Value�
�0�
�1�
�2�
�3� -5�
�6�
�Description�
�Fix� not� available� or� invalid�
�GPS� SPS� Mode,� fix� valid�
�Differential� GPS,� SPS� Mode,� fix� valid� (Not� Supported)�
�Not� supported�
�Dead� Reckoning� Mode,� fix� valid�
�?� Initialize� a� serial� interface� to� match� the� serial� data� structure� of� the� GPS� receiver.�
�?� Assemble� the� message� to� be� sent� with� the� calculated� checksum.�
�?� Transmit� the� message� to� the� receiver� on� the� RXA� pin.�
�Page� 10�
�Table� 4:� Position� Indicator� Values�
�Page� 11�
�发布紧急采购,3分钟左右您将得到回复。
相关PDF资料
RXM-GPS-SR-T
GPS MODULE SMD SIRF W/ANT
RZE002P02TL
MOSFET P-CH 20V 200MA EMT3
RZF020P01TL
MOSFET P-CH 12V 2A TUMT3
RZF030P01TL
MOSFET P-CH 12V 3A TUMT3
RZM002P02T2L
MOSFET P-CH 20V 0.2A UMT6
RZQ045P01TR
MOSFET P-CH 12V 4.5A TSMT6
RZQ050P01TR
MOSFET P-CH 12V 5A TSMT6
RZR020P01TL
MOSFET P-CH 12V 2A TSMT3
相关代理商/技术参数
RXM-GPS-SR-B
功能描述:GPS模块 GPS Receiver with Integrated Antenna
RoHS:否 制造商:Linx Technologies 频带:1.575 GHz 通道数量:20 首次定位时间(冷启动):35 s 获取敏感性:- 144 dBm 水平位置精确度:10 m 工作电源电压:3 V to 4.2 V 工作电源电流:46 mA 接口类型:Serial 最大工作温度:+ 85 C 安装风格:SMD/SMT 尺寸:15 mm x 13 mm x 2.2 mm
RXM-GPS-SR-T
功能描述:GPS模块 GPS Receiver with Integrated Antenna
RoHS:否 制造商:Linx Technologies 频带:1.575 GHz 通道数量:20 首次定位时间(冷启动):35 s 获取敏感性:- 144 dBm 水平位置精确度:10 m 工作电源电压:3 V to 4.2 V 工作电源电流:46 mA 接口类型:Serial 最大工作温度:+ 85 C 安装风格:SMD/SMT 尺寸:15 mm x 13 mm x 2.2 mm
RXM-UHF
制造商:RADIOMETRIX 制造商全称:RADIOMETRIX 功能描述:UHF Radio Telemetry Receiver Module
RXP0005
制造商:Panasonic Industrial Company 功能描述:ARM
RXP0014
制造商:Panasonic Industrial Company 功能描述:PULLEY
RXP0015
制造商:Panasonic Industrial Company 功能描述:ROLLER
RXP0016
制造商:Panasonic Industrial Company 功能描述:ROLLER
RXP0016-4
制造商:Panasonic Industrial Company 功能描述:ROLLER